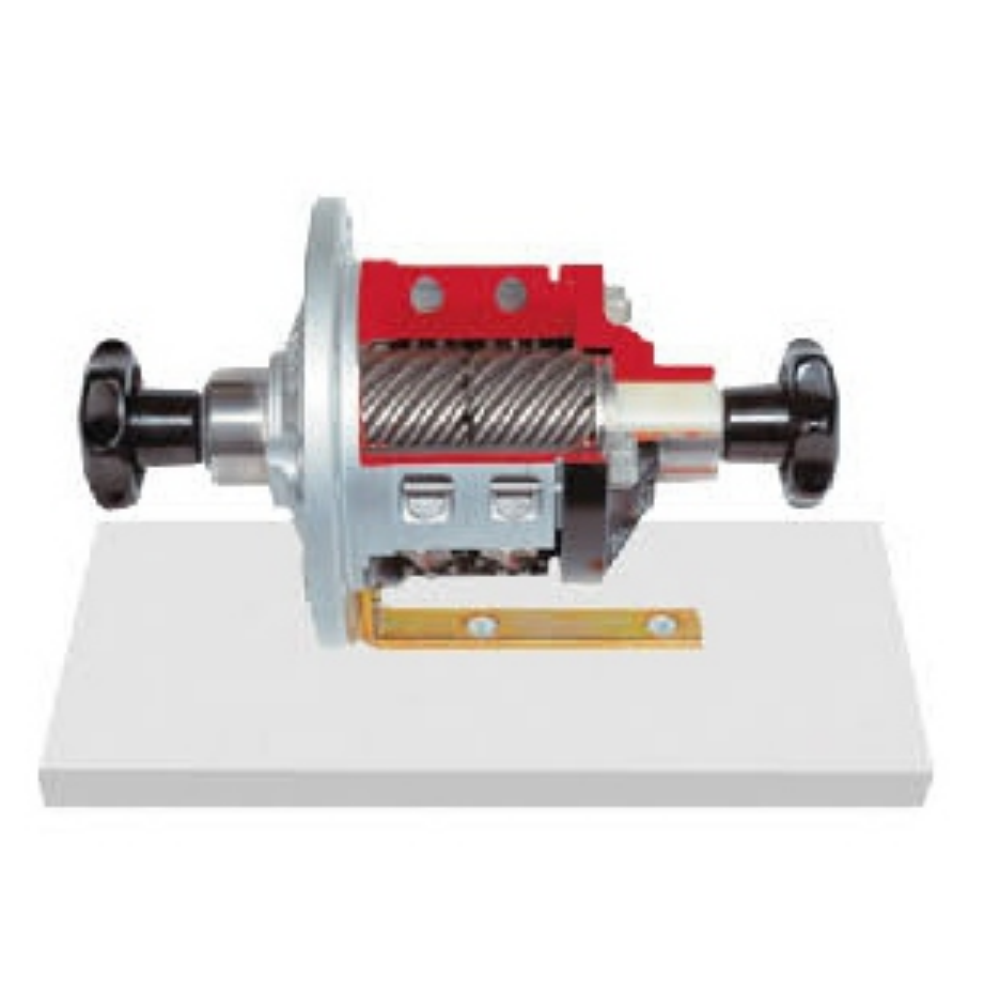
Torson-Zentraldifferential, anatomisches Modell
Lieferung: EXW Guangzhou
Versandart: Auf dem Seeweg / Luftweg / Express
Zertifizierung: CE / ISO / GPSR / Urheberrechte / Patente...
OEM-Service: OEM akzeptiert ODM akzeptiert
Anpassung: Logo / Größe / Optik / Material...
Technischer Support: Software / Handbuch / Video / Techniker
- Überblick
- Empfohlene Produkte
Produktübersicht:
Dieses Produkt ist ein professionelles Lehr- und Trainingsmodell, das auf einem realen Prototyp des Torson-Mittendifferentials basiert und präzise durch eine Querschnittsbearbeitung hergestellt wurde. Es ist speziell für die Automobilinspektion und -reparatur, die Technologie neuer Energiefahrzeuge sowie den Aufbau von Fahrwerkssystemen im Automobilbereich und andere verwandte Fachrichtungen konzipiert. Sein zentraler Zweck besteht in einer integrierten Theorie-Praxis-Lehre, praktischen Demonstrationen und Kompetenzbewertungen. Es zielt darauf ab, die didaktischen Herausforderungen beim Unterrichten der komplexen inneren Struktur des Torson-Mittendifferentials, seiner abstrakten Funktionsweise sowie der Unmöglichkeit, das reale Bauteil direkt zu beobachten, zu lösen – und unterstützt so Lehrende und Lernende dabei, rasch die zentralen mechanischen Sperrdifferenzial-Eigenschaften und die Logik der Kraftübertragung zu verstehen.
Das Modell basiert auf der originalen Torson-Mittendifferenzialbaugruppe und hält sich strikt an die ursprünglichen Komponentenproportionen sowie die Montagebeziehungen. Alle kerntechnischen Funktionskomponenten sind vollständig erhalten, ohne strukturelle Auslassungen oder funktionale Vereinfachungen. Die Kernstruktur umfasst das Differenzialgehäuse, die vordere Abtriebs-Schneckenwelle, die hintere Abtriebs-Schneckenwelle, das Schneckenradpaar (einschließlich der Schneckenradwelle), das Stirnradpaar, die Lager, die Öldichtungen sowie den Eingangsflansch. Alle Komponenten sind präzise in ihren tatsächlichen Abmessungen nachgebildet, um strukturelle Authentizität und zielgerichtetes Lehren zu gewährleisten.
Hinsichtlich der anatomischen Gestaltung werden präzise radiale und axiale Schnitte angewendet, wobei die Schnittflächen fein poliert werden, um eine glatte, gratfreie Oberfläche zu erzielen. Dadurch werden die inneren Ölleitungen, die Eingriffsstruktur von Schneckenrad und Schneckenwelle, das Übersetzungsverhältnis der Stirnräder sowie die Montagepositionen von Lagern und Öldichtungen deutlich sichtbar – ein entscheidender Durchbruch beim didaktischen Hindernis des „Unsichtbaren und Unfassbaren“. Gleichzeitig wird beim Modell ein differenzierter Farbspritzprozess eingesetzt, um Schlüsselkomponenten wie Differentialgehäuse, Schneckenwelle, Schneckenrad, Zahnräder und Lager farblich zu kodieren. In Kombination mit klaren Komponentenbezeichnungen und Beschriftungen der Ölleitungen lässt sich die Funktion und die Montagebeziehung jeder Komponente rasch erkennen und die Schwierigkeit der strukturellen Identifikation verringern.
Hinsichtlich des funktionalen Designs erfüllt das Modell sowohl Anforderungen an die statische Präsentation als auch an die dynamische Demonstration. Im statischen Zustand lassen sich die strukturellen Details, die Montagefugen und die Verbindungsmethoden der einzelnen Komponenten intuitiv erkennen, wodurch ein klares Verständnis der einseitigen Selbsthemmungseigenschaft des Schneckengetriebes vermittelt wird. Im dynamischen Zustand behält das Modell seine manuelle Antriebsfunktion bei: Durch Drehen des Eingangsflansches lässt sich der Kraftübertragungsweg sowie der Prozess der Drehmomentverteilung zwischen der vorderen und der hinteren Abtriebswelle unter drei typischen Betriebsbedingungen demonstrieren – geradlinige Fahrt, Kurvenfahrt und Durchrutschen einer einzelnen Welle. Damit wird anschaulich das zentrale Funktionsprinzip des Torsen-Differenzials vermittelt: „starre Kraftübertragung bei fehlendem Drehzahlausgleich und automatische Schlupfbegrenzung bei bestehendem Drehzahlausgleich.“ Es ist keine aufwendige externe Ausrüstung erforderlich, was die Handhabung vereinfacht und die Demonstrationswirkung besonders anschaulich macht.
Das Modell ist mit einem robusten, kaltgepressten Stahlsockel ausgestattet, der an der Unterseite über vibrationsdämpfende Pads verfügt und so effektiv ein Verrutschen sowie Umkippen während des Trainings verhindert. Es eignet sich zudem hervorragend für die Platzierung auf dem Schreibtisch, für Unterrichtsdemonstrationen im Klassenzimmer und für praktische Schulungen. Seine Abmessungen sind ideal für Lehrzwecke und ermöglichen eine einfache Handhabung sowie platzsparende Aufbewahrung. Das gesamte Modell besteht aus hochfesten, langlebigen Materialien mit stabilen Verbindungen der Komponenten, die wiederholtes manuelles Drehen und Zerlegen im Rahmen von Schulungszwecken problemlos aushalten – damit werden die Anforderungen eines langfristigen Unterrichtseinsatzes erfüllt und die Wahrscheinlichkeit von Beschädigungen oder Lockerungen der Komponenten verringert.
Der Kernwert dieses Produkts liegt darin, das abstrakte Prinzip des mechanischen Sperrdifferenzials in ein visualisiertes und handhabbares physikalisches Modell zu überführen. Es unterstützt Lehrende bei theoretischen Erklärungen und strukturellen Demonstrationen im Unterricht und ermöglicht es Studierenden zugleich, durch praktische Handhabung, Beobachtung sowie Demontage/Montage schnell die strukturelle Identifikation, das Funktionsprinzip und die zentralen Merkmale des Torsen-Mittendifferenzials zu erfassen. Damit werden die praktischen Beobachtungs- und Handlungskenntnisse der Studierenden gefördert und das Produkt zu einer unverzichtbaren Lehrhilfe für die integrierte Theorie-Praxis-Lehre und -Leistungsbeurteilung in automobiltechnischen Fachrichtungen. Es kann breit eingesetzt werden in Lehrszenarien an Hochschulen für angewandte Wissenschaften, beruflichen Schulen, technischen Fachschulen sowie automobiltechnischen Ausbildungseinrichtungen.
Merkmale:
1. Verwendet eine Torsen-Mittendifferenzialbaugruppe (mit komplettem Zubehör) zur Zerlegung, wodurch alle Komponenten sichtbar werden und sowohl die innere als auch die äußere Struktur der Baugruppe umfassend dargestellt wird.
2. Durch Zerlegung und unterschiedliche Farben, die auf jeden Abschnitt aufgetragen sind, werden die mechanische Struktur der internen und externen Komponenten sowie deren Montagebeziehungen deutlich sichtbar.
3. Der Gerätegrundrahmen (mit Schwingungsdämpfer-Pads) besteht aus 1,5 mm starkem kaltgewalztem Stahlblech, ist gestanzt und beschichtet. Die Schwingungsdämpfer-Pads sind mit M6×4-Schrauben am Grundrahmen befestigt.
Ausbildungsprojekt:
I. Grundlegende Ausbildungsinformationen
- Schulungsname: Anatomisches Modell der Torsen-Mittendifferenzialstruktur – Erkennung, Demontage, Montage und Funktionsprinzip-Schulung
- Anwendbare Studiengänge: Automobil-Inspektions- und Reparaturltechnik, Technologie für neue Energiefahrzeuge, Automobil-Fahrwerksstruktur und -reparatur, Anwendungstechnologie für technische Maschinen
- Vorausgesetztes Wissen: Aufbau von Kraftfahrzeug-Antriebssträngen, Funktionsprinzip gewöhnlicher offener Differenziale, grundlegende Eigenschaften von Schneckengetrieben
II. Ausbildungsziele
(I) Lernziele
(II) Kompetenzziele
(III) Kompetenzziele
III. Schwerpunkte und Schwierigkeiten des Trainings
- Schulungsschwerpunkte: Identifikation der Kernkomponenten des Torsen-Mittendifferenzials; standardisierte Demontage und Montage des Modells; Demonstration und verbale Erläuterung der Funktionsprinzipien unter drei typischen Betriebsbedingungen.
- Schulungsschwierigkeiten: Verständnis der einseitigen Selbsthemm-Eigenschaften von Schneckengetrieben und deren Rolle bei der Sperrfunktion; Unterscheidung des Kraftübertragungswegs und der Drehmomentverteilungslogik unter verschiedenen Betriebsbedingungen; Beurteilung und Simulation von Störphänomenen.
IV. Schulungsinhalt und -ablauf
Erste Lektion: Schulungsvorbereitung und strukturelles Verständnis
(I) Vorbereitung vor der Lektion (10 Minuten)
(II) Strukturidentifikations-Training (35 Minuten)
Zweite Lektion: Statisches Demontage- und Montage-Training
(I) Demontage-Training (25 Minuten)
(II) Montage-Training
Dritte Lektion: Dynamische Demonstration und Analyse des Funktionsprinzips
(I) Erklärung des Prinzips
(II) Demonstration und Analyse der Betriebsbedingungen
Vierte Lektion: Simulation häufiger Störungen und Fehlerbehebung + Schulungszusammenfassung
(I) Simulation von Störungen und Fehlerbehebung
(II) Schulungszusammenfassung